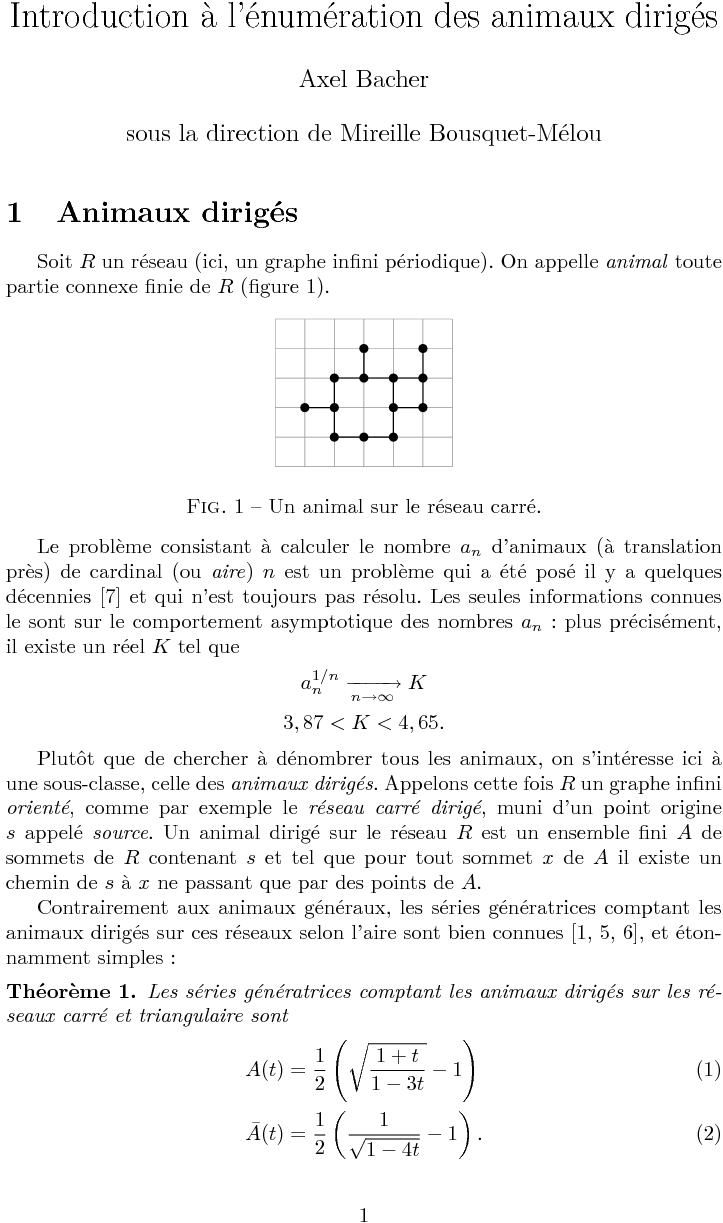
Well, apparently nobody knows how to enumerate directed animals according to the number of edges.
It is an open question of combinatorics.
The following table from
"Directed Animals on Two Dimensional Lattices" article
by A. R. Conway, R. Brak and A. J. Guttmann presents results for n<40
**Number of bond animals on the square lattice...**
```
1 1
2 2
3 5
4 14
5 42
6 130
7 412
8 1326
9 4318
10 14188
11 46950
12 156258
13 522523
14 1754254
15 5909419
16 19964450
17 67618388
18 229526054
19 780633253
20 2659600616
21 9075301990
22 31010850632
23 106100239080
24 363428599306
25 1246172974048
26 4277163883744
27 14693260749888
28 50516757992258
29 173812617499767
30 598455761148888
31 2061895016795926
32 7108299669877836
33 24519543126693604
34 84623480620967174
35 292204621065844292
36 1009457489428859322
37 3488847073597306764
38 12063072821044567580
39 41725940730851479532
40 144383424404966638976
```
Well, apparently nobody knows how to enumerate directed animals according to the number of edges.
It is an open question of combinatorics.
The following table from
"Directed Animals on Two Dimensional Lattices" article
by A. R. Conway, R. Brak and A. J. Guttmann presents results for n<40
**Number of bond animals on the square lattice...**
```
1 1
2 2
3 5
4 14
5 42
6 130
7 412
8 1326
9 4318
10 14188
11 46950
12 156258
13 522523
14 1754254
15 5909419
16 19964450
17 67618388
18 229526054
19 780633253
20 2659600616
21 9075301990
22 31010850632
23 106100239080
24 363428599306
25 1246172974048
26 4277163883744
27 14693260749888
28 50516757992258
29 173812617499767
30 598455761148888
31 2061895016795926
32 7108299669877836
33 24519543126693604
34 84623480620967174
35 292204621065844292
36 1009457489428859322
37 3488847073597306764
38 12063072821044567580
39 41725940730851479532
40 144383424404966638976
```


Comments: