

☆
1

Comments:
Nice paper along the work of [Dasgupta](https://papers-gamma.link/paper/155) and [Cohen-Addad et al.](https://arxiv.org/pdf/1704.02147.pdf).
A function to quantify the quality of a hierarchical graph clustering / dendrogram is proposed.
An interesting application to compress a dendrogram is proposed.
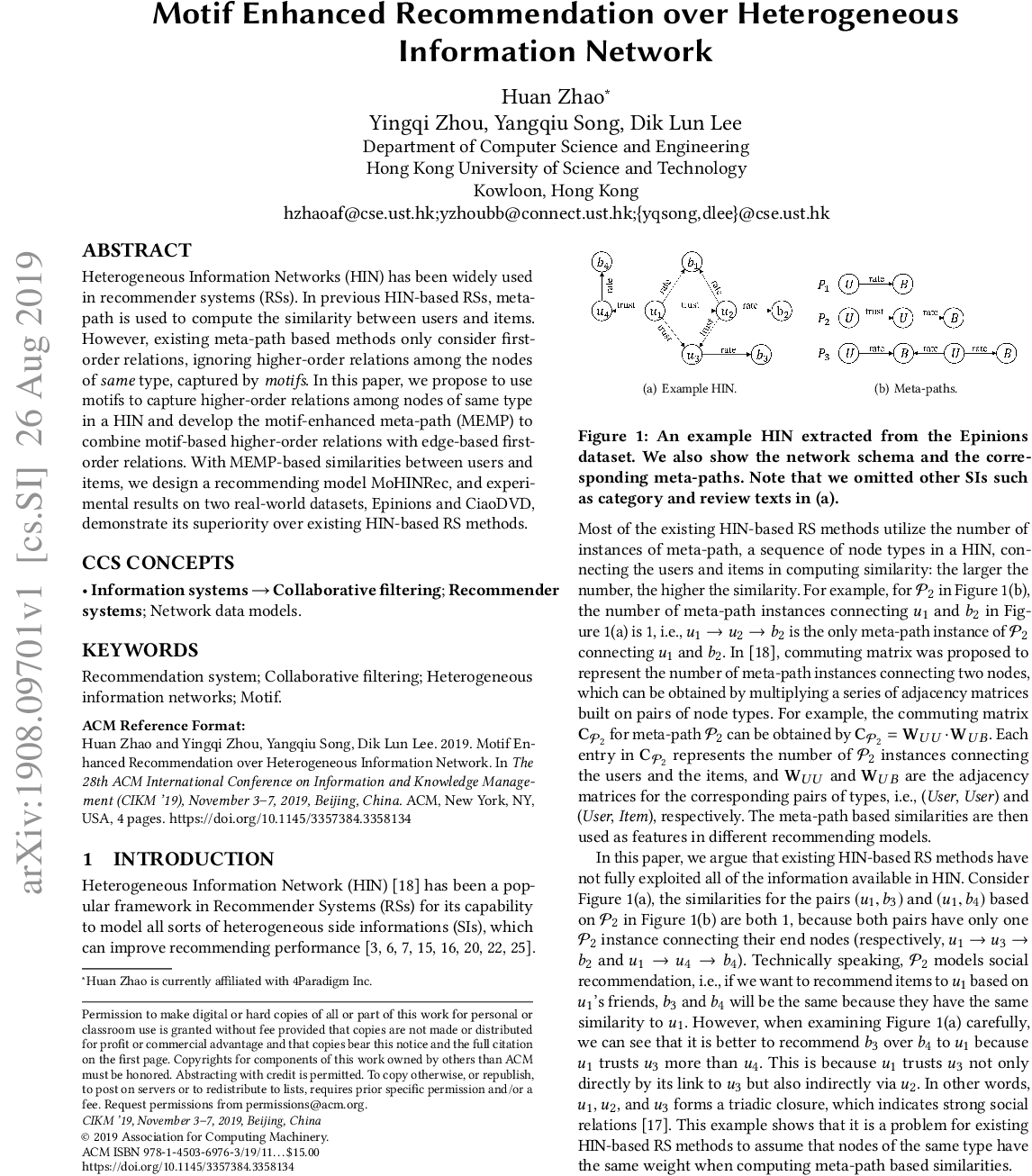
Section 8. If the input graph is a complete bipartite graph, then the quality function Q is maximum if the graph is partitioned in the two independent sets.
☆
0
Comments:
For a fast screening: Figure 1, Figure 4 and conclusion.
Can we use a hierarchical tree directly as input to machine learning algorithms instead of vectors?
Code:
- https://github.com/maxdan94/LouvainNE
- https://github.com/maxdan94/RandNE
Comments: