

Wellcome to Stranger's library,
You can find here all papers liked or uploaded by Strangertogether with brief user bio and description of her/his academic activity.
to appear...
☆
0
Comments:
# Summary
### Introduction
##### about hybrid reco :
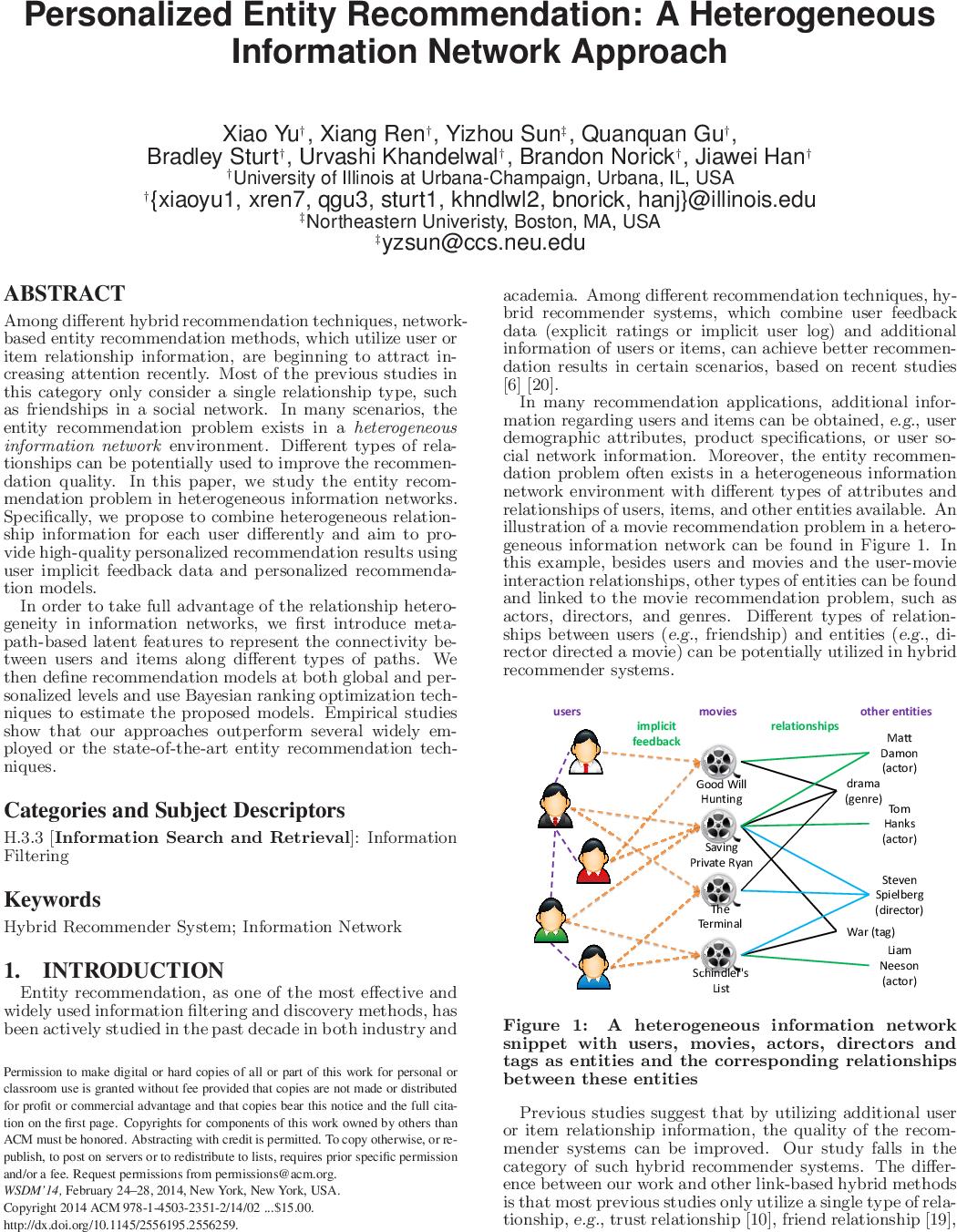
- many RS have an underlying HIN structure and are achieving hybrid reco (in the sense using both user feedbacks and content-based info)
##### difference with existing methods :
- use different types of relations, benefit : use the fact that users consume an item for different reasons (e.g. : movie for genre, for director, etc)
##### Recommender System :
- combine users feedback and various types of info in a collaborative filtering style
- use metapath in HIN to generate reco
- technical implementation uses Matrix Factorization
##### Datasets :
- MovieLens 100K combined with IMDB and Yelp, implicit feedback only
##### Contributions:
- study reco with implicit feedback in HIN
- use network heterogeneity to spread preferences on the metapaths
- generate personalized reco
- specific case study : ML100K and Yelp
### Background and preliminaries
##### binary user feedback
- explain how to generate the bipartite adjacency matrix
##### Heterogeneous Information Network
- definition (using entity mapping function and link entity mapping function)
- vocabulary to describe HIN
##### Matrix Factorization for implicit feedback
- describe principle of MF (decomposing the feedback matrix)
- resolution using NMF
##### Problem definition
- how to make personalized recommendation based on implicit feedback in the form of a list of recommendations
### Meta-path based latent features
##### meta-path
- definition and interest (types of paths in a HIN)
- can be used to measure similarity and proximity between entities
- ex: user [watches] movie [watched by] user [following] actor [starring] movie
##### user preference diffusion
- type of meta-paths considered in the paper : user -> item -> * -> item (* may be tag, genre, director, plot for ML100K ; * may be category, customer, location for Yelp)
- define user preference score : normalized weighted sum of the number of paths to a given item (eq 2)
- if L types of metapaths, then L matrices R (user preference matrices)
- use these scores to build the recommendation model
##### global recommendation model
- define the recommendation mechanic which is inspired by MF
- (?) MF may be achieved on each user preference matrix taken separately : find a couple of reduced matrices with NMF, then prediction model is given by equation 4
- RK: not personalized as coefficients are the same for every user
### Personalized recommendation model
- same principle as global recommendation method, except that there is first a clustering, and the learning is achieved cluster per cluster
- the number of clusters is a parameter of the method
### Model learning with implicit feedback
- learning the model parameters (thetas in equation 4)
- use implicit feedback to do so (1 = user browses item / 0 = user does not)
- usually prediction done with either classification or learning-to-rank but their approach: rank 1s above 0s (in the spirit of ref 21)
##### Bayesian ranking-based optimization
- assumption: a user ranking is independent from the others (allow to get eq.7)
- assumption on the probability expressed in equation 8
- allows to derive the expression of objective function O
##### optimization algorithm
- optimization: finds thetas such that dO/dTheta = 0
- method: Stochastic Gradient Descent
##### learning personalized recommendation models
- this technique is not personalized
- to personalize the reco: clusters with a k-means method
### Empirical study
##### Data
- dataset 1 : IMDB + ML100K (IM100K); if user has seen movie 1 else 0
- dataset 2 : Yelp; if user has reviewed buisness 1 else 0
- d2 much sparser than d1 (see feedback distribs on figure 5)
- temporal split 80% / 20% between training and test
##### Competitors and evaluation metrics
- RS benchmarks: popularity-based, co-click, NMF (baseline of collaborative filtering), hybrid SVM
- for their method: 10 different metapaths différentes (see Table 6.2)
- evaluation: as based on implicit feedback, precision at position and top-10 mean reciprocal rank (MRR_k)
##### Performance comparison
- Table 3 for a summary
- very few items interact with a lot of users
- parameters for NMF: dimension of the reduced matrix: 20 (IM100K), 60 (Yelp)
- Hybrid-SVM uses the same info as their method (HeteRec) and uses PathSim
- in general HeteRec better than all benchmark methods
- in particular HeteRec > Hybrid-SVM (while similar information)
- improvement higher for Yelp than for IM100K, possibly a consequence of Yelp sparsity
- HeteRec-p (personalized version) : even better than HeteRec-g
##### Performance analysis
- more precise analysis of the performances on IM100K only for HeteRec-g , HeteRec-p , NMF , Co-Click
- divide in 6 different training sets, depending on various parameters
- performances increase with the number of movies watched for all methods except co-click
- performances decrease with movies popularity for all methods except co-click
##### Parameter tuning
- HeteRec have more parameters
- regularization parameter lambda (eq 9) computed with cross-validation
- sampling necessary for Yelp (as 10^12 elements), performance variations with sampling represented on Fig7 (relatively stable)
- for HeteRec-p: number of clusters, see fgure 6c
### Related work
##### CF based hybrid RS
##### Information network analysis
Comments: